Projektbeschreibung
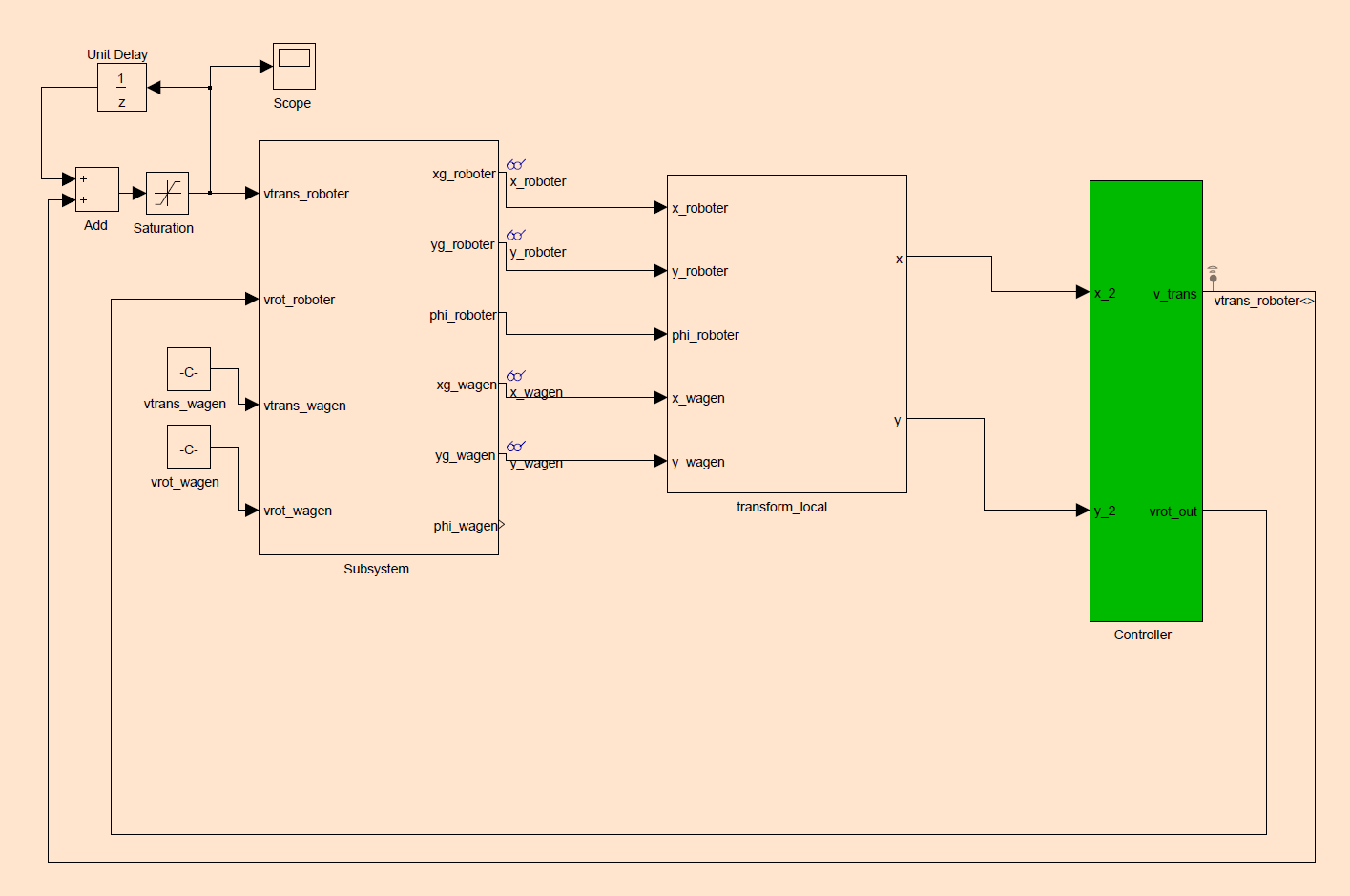
In diesem Projekt wurde ein Regler realisiert, der basierend auf Laserscandaten ein Fahrzeug im Gehänge erkennt, diesem folgt, sich aufsynchronisiert und eine Batterie in das Fahrzeug ablegt. Die Herausforderung in dem Projekt bestand aus Erstellung eines adequaten dynamischen Modell des mobilen Roboters und dem Tracking des Fahrzeugs im Gehänge. Das Rauschen der Erkennung wurde mit eines Kalman-Filter geglättet. Die Regelung hatte eine Abweichung von wenigen Millimetern bei einer Regelfrequenz von 40 hz.
dezember 2010 - juli 2011