Projektbeschreibung
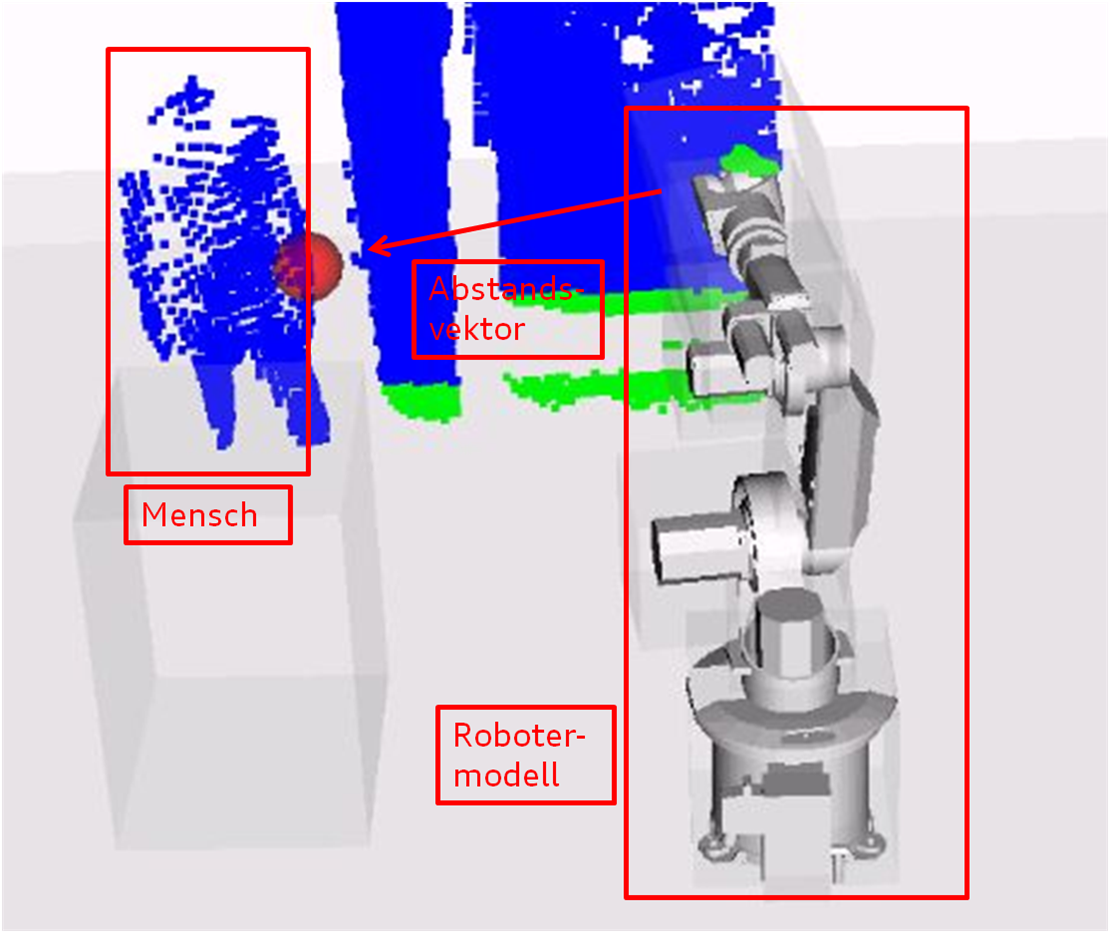
Ziel des Projektes war die prototypische Umsetzung einer Echt-Kollisionsvermeidung basierend auf 3D-Daten. Dazu wurden mehrere PMD-Sensoren verwendet. Die Problematik der Verschattung wurde durch die Sensorplatzierung am Roboter entgegengewirkt. Die Erkennung des Menschen wurde die Subtraktion bekannter Objekte aus der Szenerie erreicht. Die Berechung erfolgte auf der GPU um die enorme Datenmenge in Echtzeit zu verarbeiten und die Geschwindigkeit entsprechend des Mensch-Roboter-Abstands zu regeln.
dezember 2010 - dezember 2012