das ist meine promotion
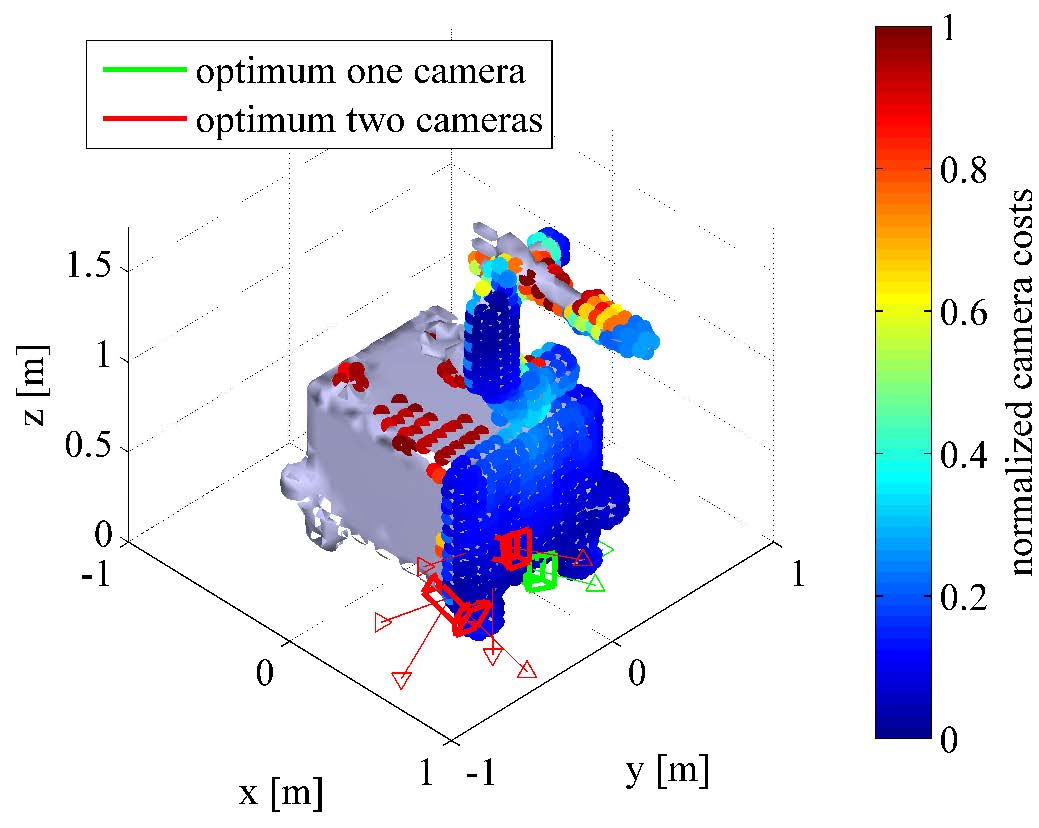
Meine Arbeit befasst sich mit der optimalen Sensorplatzierung von 3D-Sensoren an einem mobilen Robotersystem für die Mensch-Roboter-Kooperation. Dazu werden synthetische Pfade von Mensch-Roboter erzeugt um deren Zusammenarbeit in einem gemeinsamen Arbeitsraum zu simulieren. Eine Kostenfunktion basierend sowohl auf der Wahrscheinlichkeit eines Zusammenstoßes und der rechtzeitigen Erkennung als auch der zur Verfügung stehenden Ressourcen wird numerisch optimiert. Da der Suchraum sehr groß ist, wird eine heuristisches Verfahren benutzt.
märz 2011 - jetzt